EDA基础知识总结
一、布局
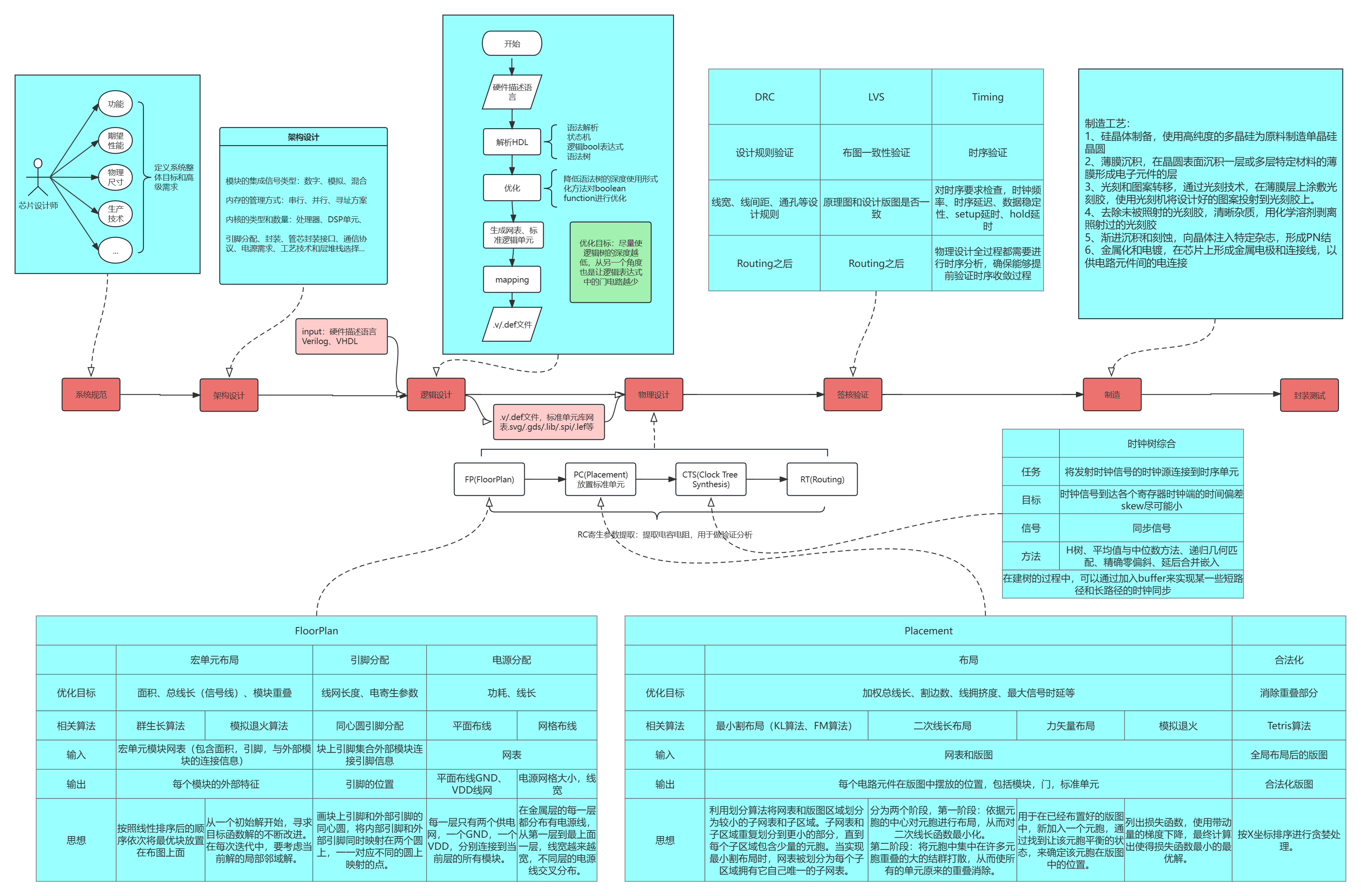
布局算法:二次线长布局算法+力矢量布局
设计目标:调整不同元胞在元胞中的摆放位置,使得元胞在版图中的连线最短,同时确保在布局中没有重叠
二次线长布局分为两个阶段
第一阶段:依据元胞的中心对元胞进行布局,从而对二次线长函数最小化
第二阶段:将元胞中集中在许多元胞重叠的大的结群打散,从而使所有单元原来的重叠消除
1 | |
数据结构设计
1、元胞可以抽象成一个含有x,y坐标的结构体
2、网表抽象为二维map,记录不同元胞之间的连线情况,同时x,y代表元胞在map中所处的位置信息
算法主要思想
第一阶段:全局布局(二次线长布局)
在全局布局的过程中,将元胞的坐标抽象成为中心点的坐标,不考虑其面积、大小以及布局的合法化,仅仅是以最优化模块之间的线长为目标。
1 | |
距离计算代价函数

通过求偏导数,解出x和y。
第二阶段:详细布局(力矢量布局)
用于在已经布置好的版图中,新加入一个元胞,通过找到让该元胞平衡的状态,来确定该元胞在版图中的位置。
采用力学中的质点弹簧系统来建模,每个元胞运动吸引其他元胞,其中吸引力与距离成正比。如果所有元胞到达它们的平衡位置,线长将得到最小化。将目标转化为将所有的元胞放在一个力平衡的位置上。——称为零力目标(ZFT)
1 | |
Loss为权重乘以坐标差的累计和
时间复杂度
假设元胞的数量为n
二次线长布局的时间复杂度为:O(n^2),需要遍历一遍map,找到各个节点之间的连线信息
力矢量布局的时间复杂度为:O(n^2)
二、布线
布线算法:FLUTE算法
设计目标:找到能将节点连接的最小斯坦纳生成树
在EDA的布线中,各个板块的IO接口以及时钟接口之间,通常是走的斯坦纳线,而直接求斯坦纳最小树是NP完全问题,使用FLUTE算法可以将RSMT问题转化为查找表的问题
1 | |
算法数据结构设计
1、POWV(Potentially optimal wirelength vectors)
在FLUTE算法中,会使用一种带有信息(权重)的数据结构(向量)来表示一种斯坦纳树,任意一棵斯坦纳树都可以使用唯一的POWV来表示,一个POWV向量可以表示多棵不一样的斯坦纳树,如下图。
前面三位表示x方向上的length
后面三位表示y方向上的length

2、POST(potentially optimal Steiner tree)
对每一个POWV都会对应存储一个POST,也就是说,不是存储所有的斯坦纳树,只是存储一个可能的斯坦纳树,因为同一个向量的所有斯坦纳树的代价总和总是一样的。POWV和POST会构建成一个映射关系,同时将其存入到一个Table中,表中还包含POWV的总权重。而此时,权重最小的则可代表一个最小斯坦纳生成树。
3、table可以使用哈希表来进行设计
使用POWV做表头,权重和POST作为value,给出节点后,生成所有的可能的POWV表,再通过权重对其进行排序,取其POST作为斯坦纳树结果。
算法主要思想
1 | |
- 生成查找表算法

时间复杂度
时间复杂度为:O(nlgn)
三、静态时序分析
单元库
在静态时序分析中,单元库(library)是指一个集合,其中包含了各种标准的逻辑元件、时序元件和组合元件的建模。单元库中的元件通常带有特定的时钟延迟和逻辑功能,以及电压和温度等方面的参数,通过使用单元库,可以在时序分析中模拟和评估设计的时序特性,以帮助发现和解决潜在的时序冲突和时序失效问题。
互连寄生
互连寄生是指在集成电路或电子系统中,由于导线或连接器的存在,引起的非理想的电特性和效果。主要包括电容和电阻,互连寄生会对电路的信号传输、功耗、噪声和时序等方面产生不良的影响。
电阻寄生:互连导线的电阻会引起信号的衰减和功率损耗。较长的导线通常具有更大的电阻。
电容寄生:互连导线的电容会引起信号的延迟和功耗。电容会存储和释放电荷,导致信号传输速度变慢。
单元时延(NLDM表格)
单元时延(NLDM表格),全称为非线性延迟模型(Non-Linear Delay Model),是一种常用的静态时序分析中的时延模型。在数字电路设计中,时延模型用于描述逻辑元件(如门级电路或时序元件)的输出到输入之间的传播延迟。
NLDM表格是一种常见的时延模型,它以表格的形式表示输入到输出之间的传播延迟。表格的输入是逻辑元件的输入端的不同组合,并且通常包括输入的电压和电流等参数。表格的输出是逻辑元件的输出端的延迟时间,通常以纳秒或皮秒为单位。
NLDM表格通常由电路设计工具根据所用的逻辑元件和工艺库生成。基于这个模型,可以进行静态时序分析,以评估电路的时序性能,如时钟周期、信号传输延迟和时序失效等。
线网时延(Elmore计算)
线网时延,也称为Elmore时延,是一种常用的近似计算方法,用于估计电路中导线上的传播延迟。它是一种简化的时延模型,适用于传输线上电压/电流从输入端到达输出端的时间。
1 | |
串扰噪声的定义
噪声是指电路中任意节点上不希望出现的电压或电流的偏差。当噪声作用于某个电路节点上时,它可以瞬间破坏该节点上存储的逻辑信息。如果这一破坏状态被锁存到锁存器中,那么将会导致功能性错误。
主要有毛刺和延时噪声。
时序检查(Setup/Hold)
时序检查是在数字电路设计中进行的一种重要时序分析,用于验证和确保输入信号在时钟边沿触发时的稳定性和正确性。
Setup Time:是指在时钟边沿到达之前,输入信号必须稳定在其有效值的时间。如果输入信号在设置时间窗口内没有稳定,可能会导致电路中的逻辑冲突和错误。
Hold Time:是指在时钟边沿到达之后,输入信号必须继续保持在其有效值的时间。如果输入信号在保持时间之前改变或不稳定,也会导致电路中的逻辑错误。
时序路径定义
时序路径(Timing Path)是指信号从一个寄存器节点(如时钟触发器)通过逻辑路径传播到另一个寄存器节点的路径。它描述了数据在电路中的传输和处理过程,并对时序分析和时序优化提供了重要信息。
通过分析时序路径,可以确定信号在路径中的传播延迟,包括设置时间和保持时间等重要时序要求。时序路径分析可用于预测时钟频率、检测时序冲突、优化时序性能,以及验证设计是否满足时序规约等。
时序约束命令

四、EDA性能
解决EDA软件中的性能问题
算法:优化数据结构,提高算法性能,降低算法的复杂度
硬件:确保计算机的硬件资源重组,对于一些矩阵操作可以考虑使用GPU加速
分布式:将问题拆解成可以并行计算的小问题,开发支持并行计算的EDA工具
五、EDA后端
- EDA后端软件开发的流程
六、EDA工具
常见的EDA仿真工具和Debug工具分别有哪些?它们有什么优势和不足?
仿真工具:
- ModelSim/QuestaSim (Mentor)
- VCS (Synopsys)
- Xilinx Vivado Simulator (Xilinx)
- Incisive (Cadence)
- Icarus Verilog
优势:
- 高度准确和精确的模拟功能。
- 可以模拟各种不同级别的设计,从门级仿真到系统级仿真。
- 支持时序和功能仿真,可以检测和调试设计中的逻辑错误和时序问题。
不足:
- 仿真时间较长,尤其是对于大型和复杂的设计。
- 需要大量的计算资源(CPU和内存)。
- 对于某些特定的设计场景,可能需要针对特定工具进行配置和优化。